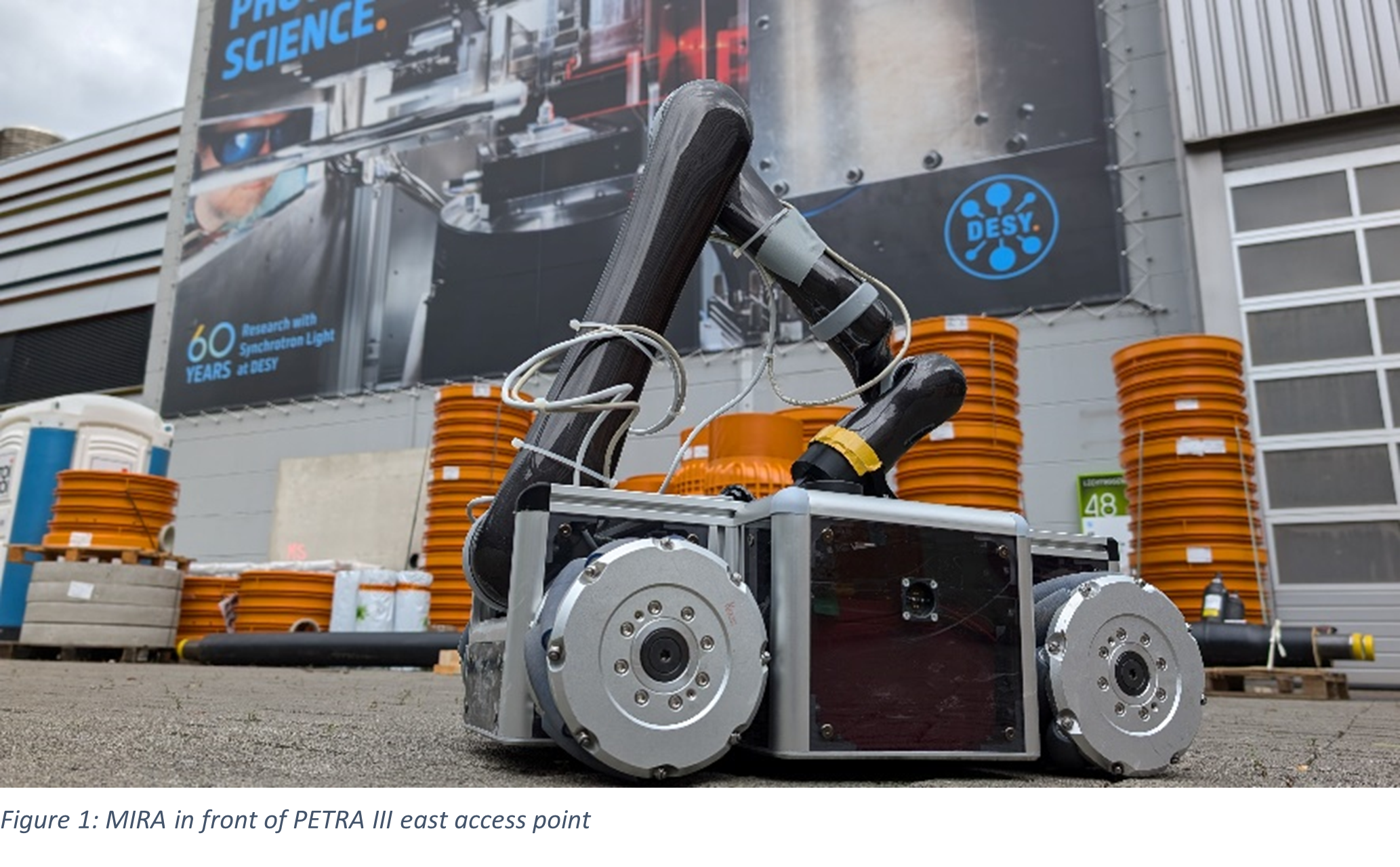
The recent CEM robotic test campaign at DESY in Hamburg conducted from July 1 to 3, 2024, marked a significant advancement by demonstrating the successful operation of the MIRA robot in a new hazardous environment outside of CERN. Over three days, the MIRA robot was put through extensive teleoperation and autopilot testing within the PETRA III accelerator tunnel. The tests aimed to evaluate the robot's functionality in semi-structured tunnel environments, focusing on its ability to perform remote operations and autonomous navigation. Despite facing network integration challenges, the tests successfully demonstrated the MIRA's robust performance and reliability. The robot maintained stable connections over long distances, effectively navigated through the PETRA III tunnel environment by using the autopilot showcasing its potential for future robotic applications at DESY.
Preparations for the Visit
Ahead of the test campaign, substantial network preparations were undertaken to ensure seamless operation of the MIRA robot. Several Wi-Fi routers were prepared for installation within the PETRA III tunnel. The network was configured in a bridged setup, enabling multiple routers to create a unified network, ensuring a reliable connection throughout a 400-meter-long section of the tunnel.
Network Configuration & Testing
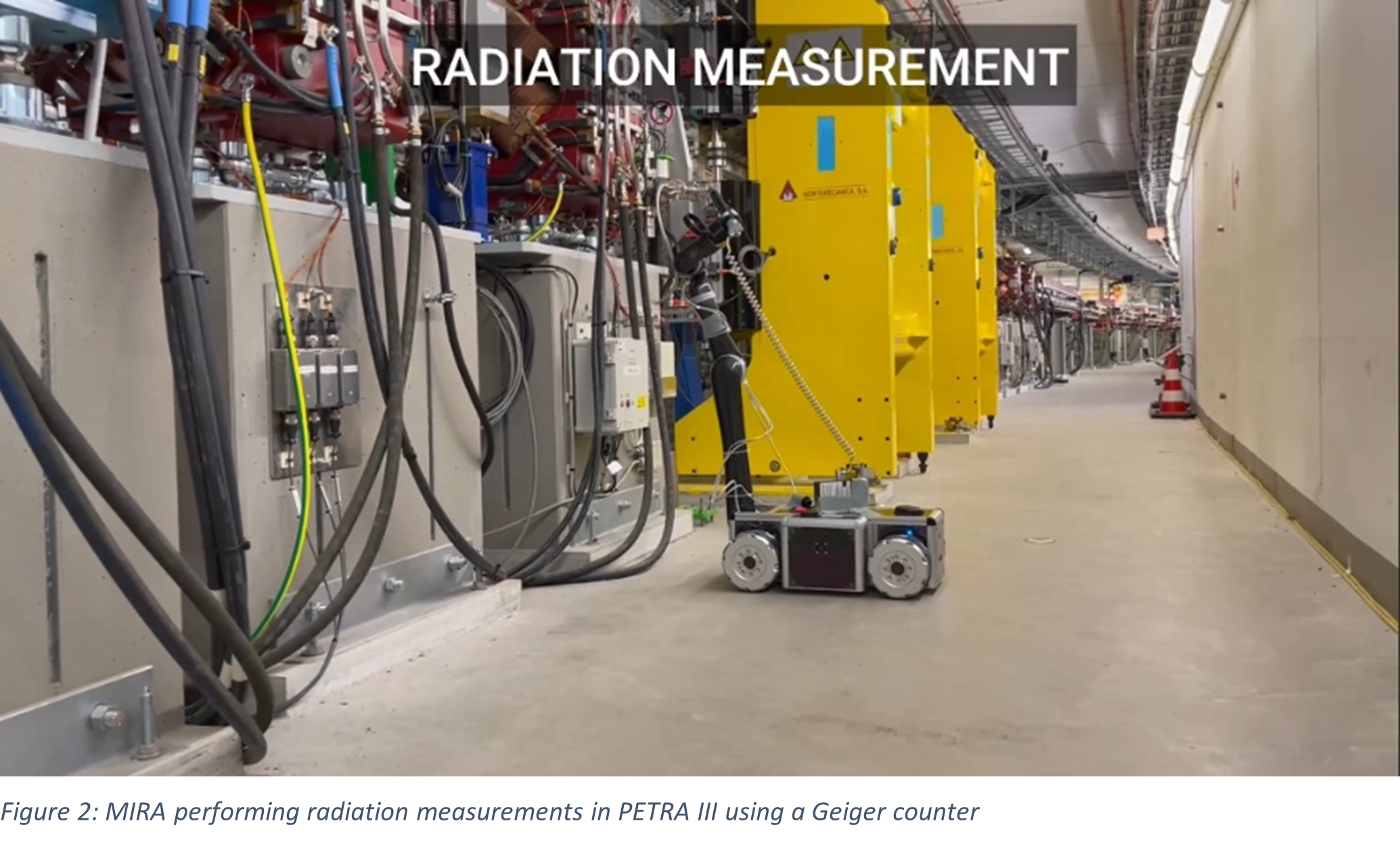
Following the robot’s delivery to Hamburg, several hardware tests were conducted to ensure its robustness for the upcoming experiments. The team then faced challenges integrating DESY's routers into the network, leading them to deploy three CERN Wi-Fi routers throughout the PETRA III tunnel to establish a reliable connection. It was also discovered that 5G coverage extended into most of the PETRA III tunnel due to its proximity to the surface. A comprehensive 5G network study revealed that over 95% of the tunnel had strong coverage. However, the northern FLASH intersection had weaker 5G coverage, and the presence of staircases complicated access for mobile robots. For remote testing, a Geiger counter provided by DESY was installed on the MIRA robot to conduct radiation measurements in the east section of PETRA III tunnel, as shown in Figure 2.
Demonstration of MIRA Teleoperation & Autopilot Capabilities
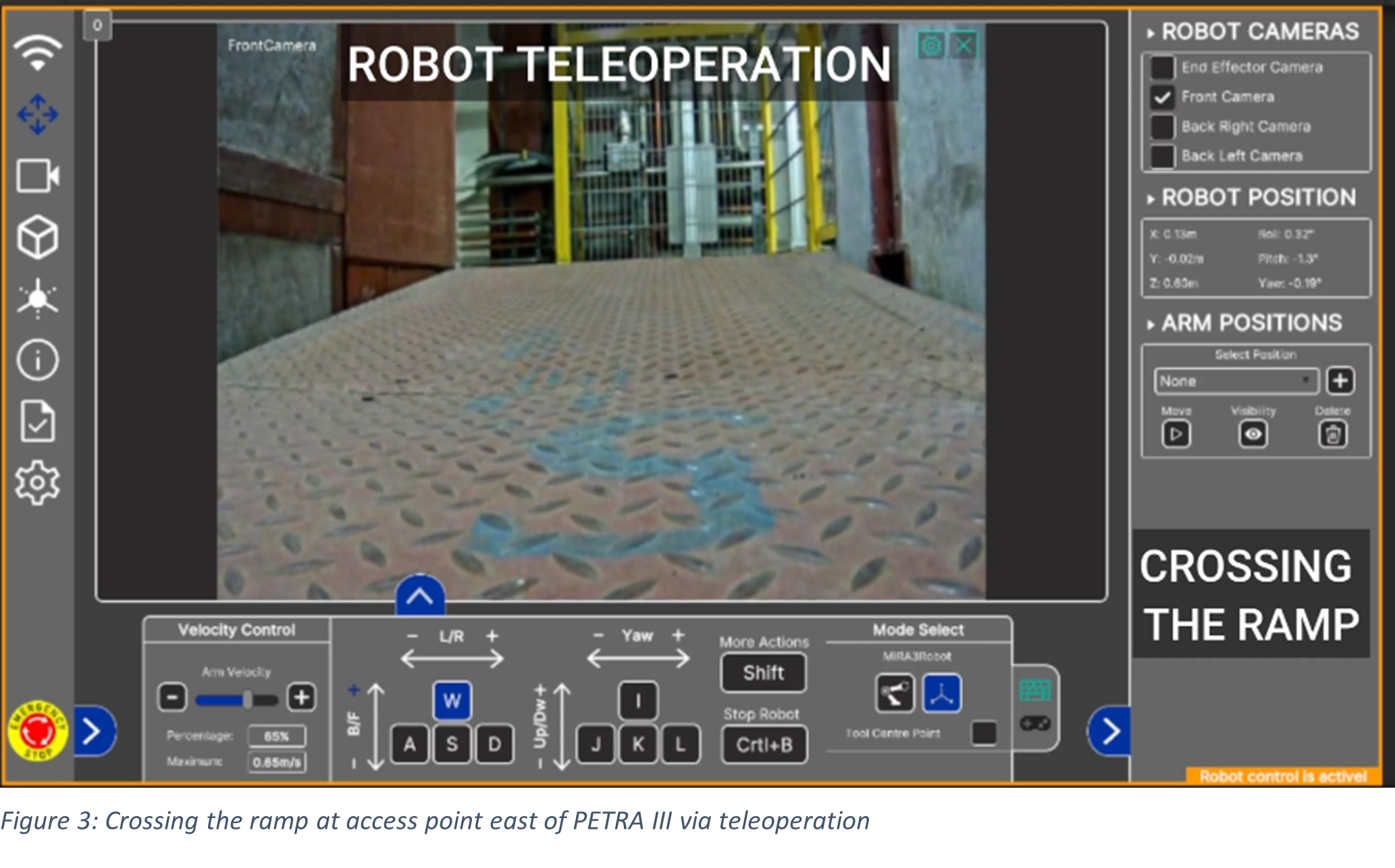
The MIRA robot’s final demonstration at PETRA III was a resounding success. Teleoperation proceeded flawlessly, with the robot maintaining a stable connection over a 400-meter distance thanks to the network of three bridged Wi-Fi routers. A new version of the GUI, combined with an updated Motion Controller, was also tested successfully, enhancing overall control and precision while navigating steep ramps at the access points as can be seen in Figure 3.
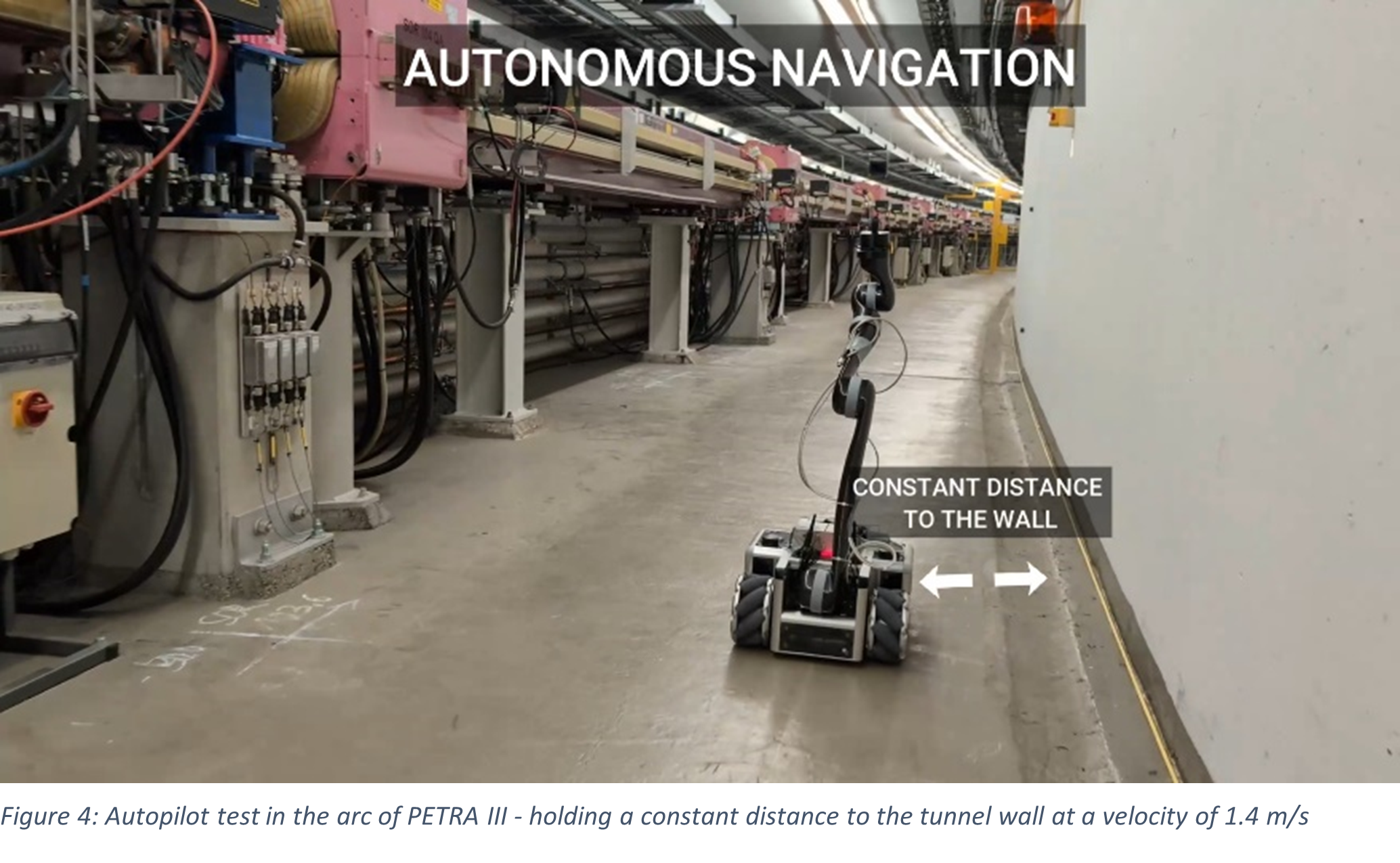
Extensive testing of the autopilot mode proved successful, with the robot accurately adjusting its distance from the tunnel walls and effectively avoiding obstacles such as cones and metal plates. It navigated through door frames safely and remained stable at speeds up to 1.4 m/s, matching those used in similar robotic surveys in the SPS. The autopilot system utilized a combination of 2D-360° LiDAR and wheel odometry to navigate the tunnel. The RANSAC line detection algorithm was used to track the tunnel wall as a landmark. This reference system allows navigation relative to the tunnel wall, in combination with a PID controller maintaining precise positioning. Following this successful demonstration, the MIRA and its equipment were packed for transport back to CERN, marking the conclusion of the test campaign.
Evaluation & Future Work
Overall, the teleoperation and autopilot test campaign of the MIRA robot at PETRA III was highly successful, demonstrating that CERN's robotic hardware and software are effective in various tunnel scenarios and semi-structured environments. The success of these tests indicates that future integration of advanced detection models, such as the “Detectron 2 R-CNN” for component classification, could enable even more comprehensive autopilot capabilities for future autonomous remote inspections. Further testing can be pursued, focusing on key tasks such as thermal camera observation and autopiloted radiation surveys of accelerator components, which represent the main robotic goals of DESY in PETRA III.
