Toward the end of last year, the robotics team received a request to inspect hot areas in TCC2 and test for potential beryllium contamination. The team collaborated with various groups to define a detection procedure using dry wipes, and designed, built, and tested a new tool for the CERN robot CRANEbot to carry out the intervention. The development and preparation were completed within three working days. This demonstrates the effectiveness of the modular mechanical and software design of the group robotic fleet.
The intervention procedure has been defined together with specialists on Beryllium detection with dry or wet colorimetric wipes. To minimize the risk of evaporation, dry wipes were selected for the robotic sampling process and a linear sweep of 10 cm lengths has been defined.
First, the robot approaches each target location and performs a sweep at every site. After the robot returns to a designated safe area for personnel access, water is applied to the calorimetric dry wipes. A blue color change indicates the presence of beryllium contamination.
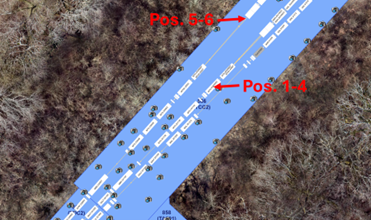
In collaboration with BE-EA, six target locations with the highest likelihood of beryllium contamination were identified (see Figures 1 and 2).
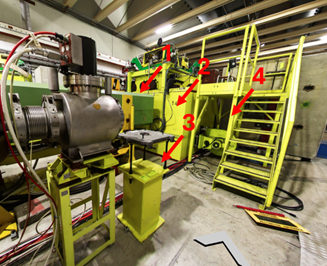
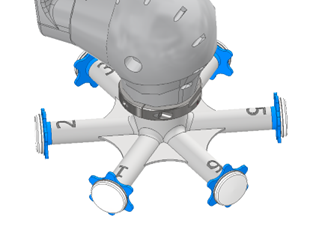
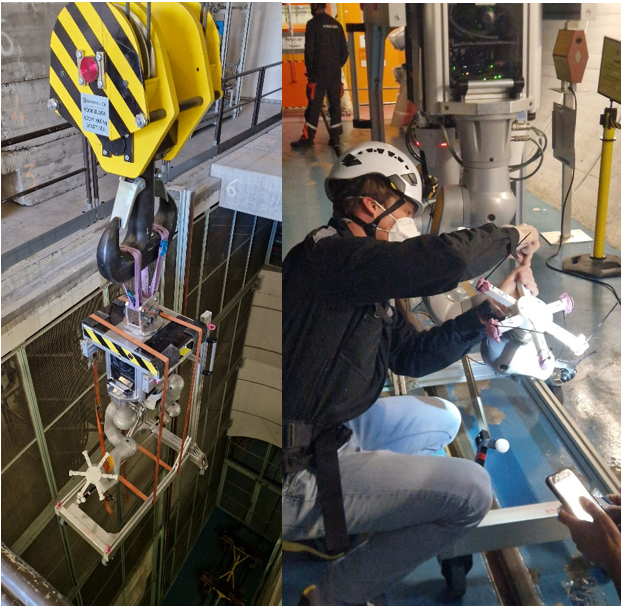
A feasibility study on the accessibility of the target locations concluded that the wipe tests must be performed using a robot suspended from the overhead crane installed in TCC2. This robotic system, known as CRANEbot, is shown in Figure 3 together with a newly developed tool. The tool is designed to hold at least six dry wipes simultaneously, enabling multiple sweeps while ensuring uniform surface contact with the environment.
Following successful tests in the Robotics Laboratory 927, approval was granted for the intervention to take place the following day. The intervention began at 14:00 with the deployment of CRANEbot to U0-001 and the installation of the dry wipes onto the 3D-printed tool (see Figure 4).
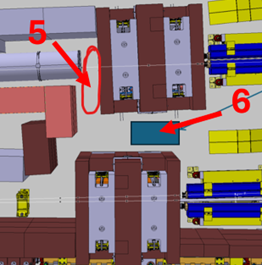
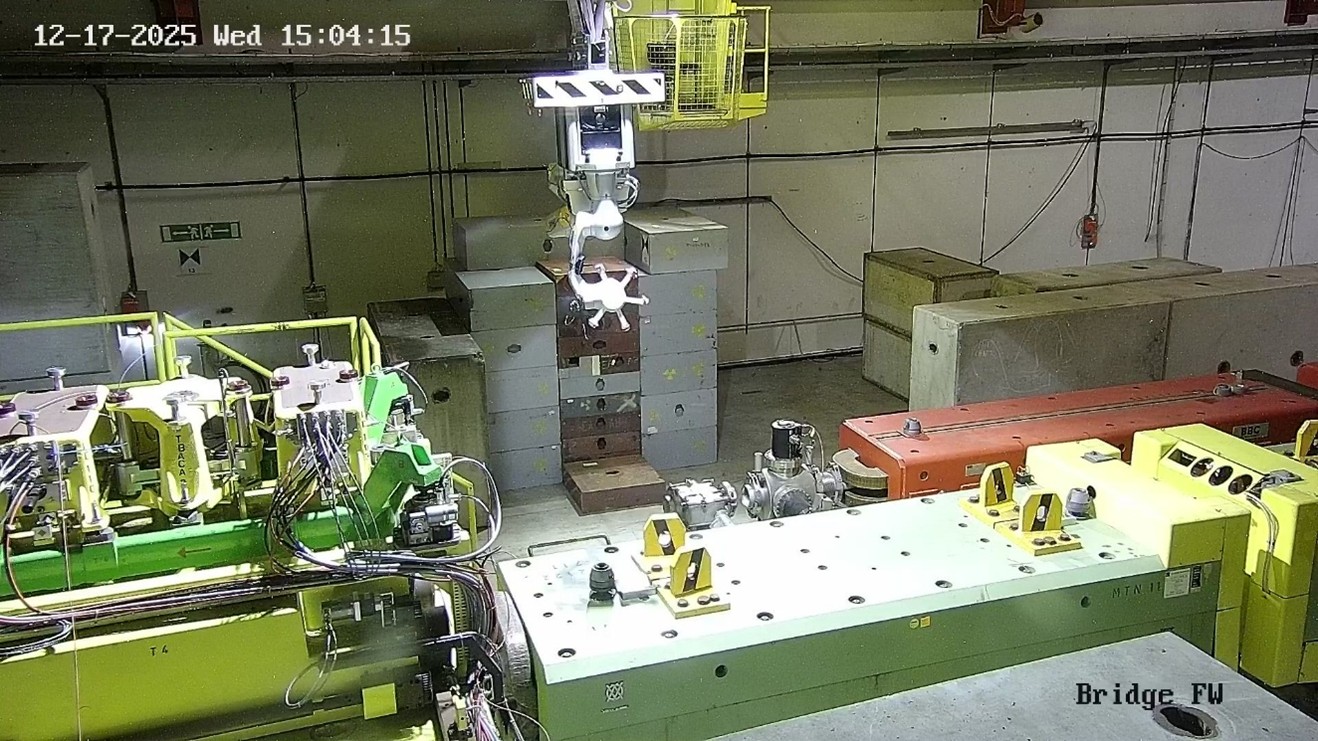
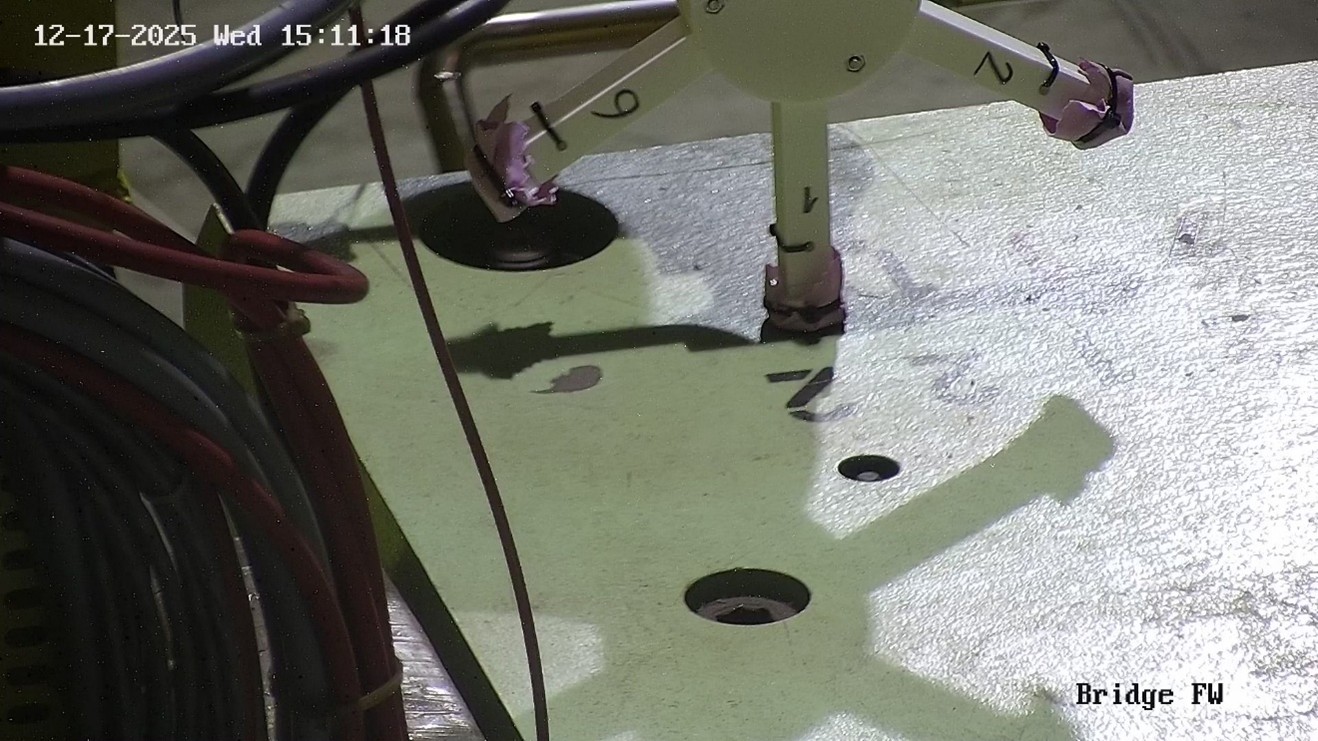
CRANEbot was subsequently installed on the overhead crane in TCC2. At 14:45, the intervention started, and the robot was deployed to target positions 1–6 to perform the wipe tests (see Figures 5 and 6).
At each target location, the corresponding arm was brought into contact with the environment. The caps beneath the dry wipes were specifically 3D-printed to provide compliance with the contacted surfaces.
The robot was teleoperated from a control station in coordination with on-site personnel responsible for operating the overhead crane in TCC2. This collaborative setup ensured safe and precise positioning of CRANEbot during the intervention (see Figure 7).

At 16:05, the intervention was successfully completed, and the robot was returned to its start position after a total intervention time of 1 hour and 20 minutes.
The dry wipe samples from all six target locations, still mounted on the robot tool, were subsequently inspected for potential beryllium contamination (see Figure 8). At this stage, no beryllium contamination was detected.
