BE-CEM is developing the high-performance field Sensors Acquisition and Motion Control system (SAMbuCa), with the purpose of consolidating the sensor, actuator and driving electronics requirements of the different motion control systems at CERN.
The system, which is set to be deployed during LS3, will be used for the LHC collimators, North Area targets, UA9 collimation (LHC and SPS) and scrapers, as well as for the HL-LHC Full Remote Alignment System (FRAS). The above list is non-exhaustive as the SAMbuCa system has also attracted the attention of other groups at CERN.
Initially foreseen to be based on a combination of the PXIe and DI/OT platforms, the SAMbuCa system has undergone a significant redesign in the past 1.5 years, resulting in a purely DI/OT-based solution. This redesign has been driven by the need to address several shortcomings of the initial design, in particular related to thermal dissipation issues and complicated (and very expensive) cabling.

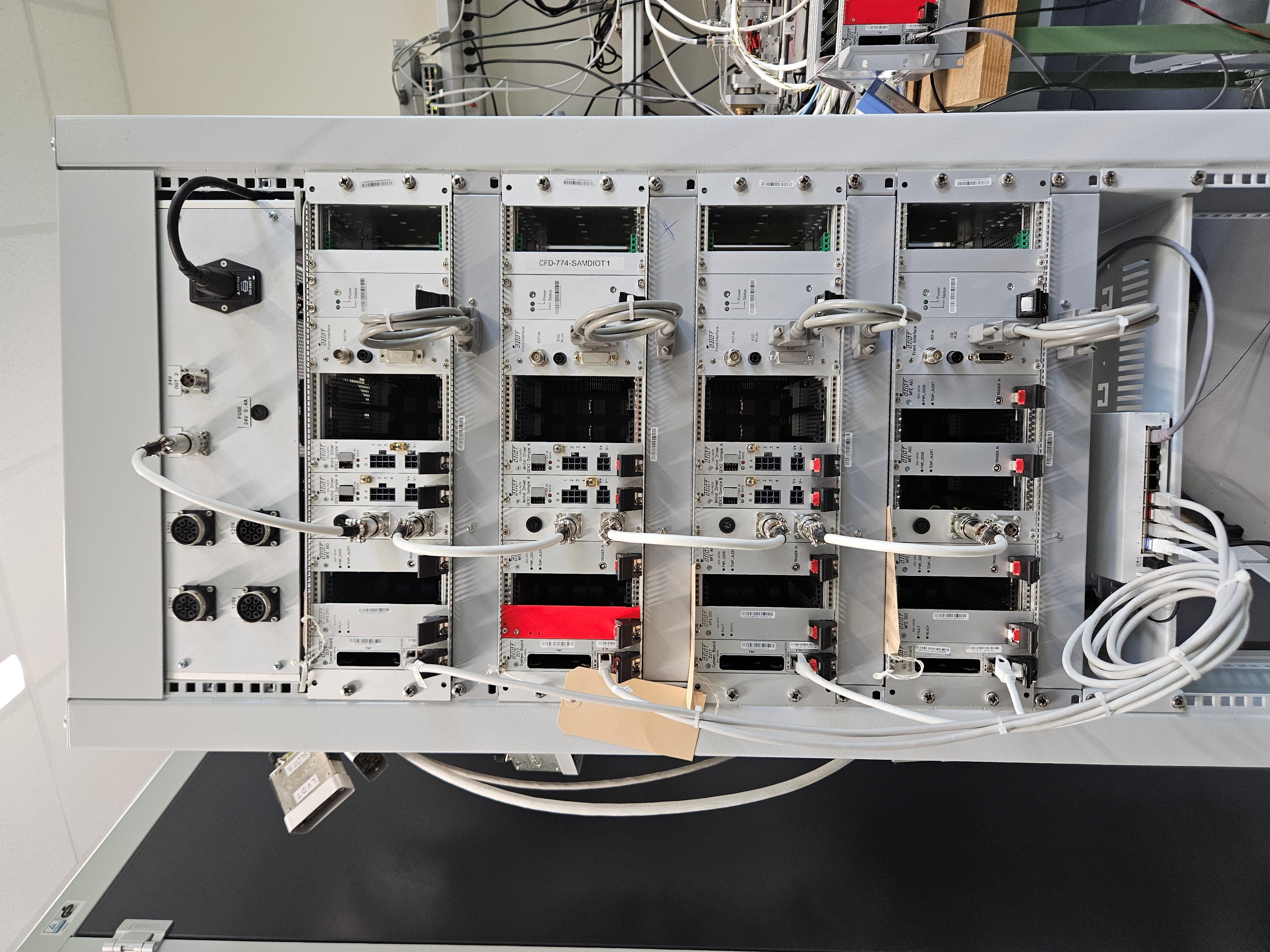
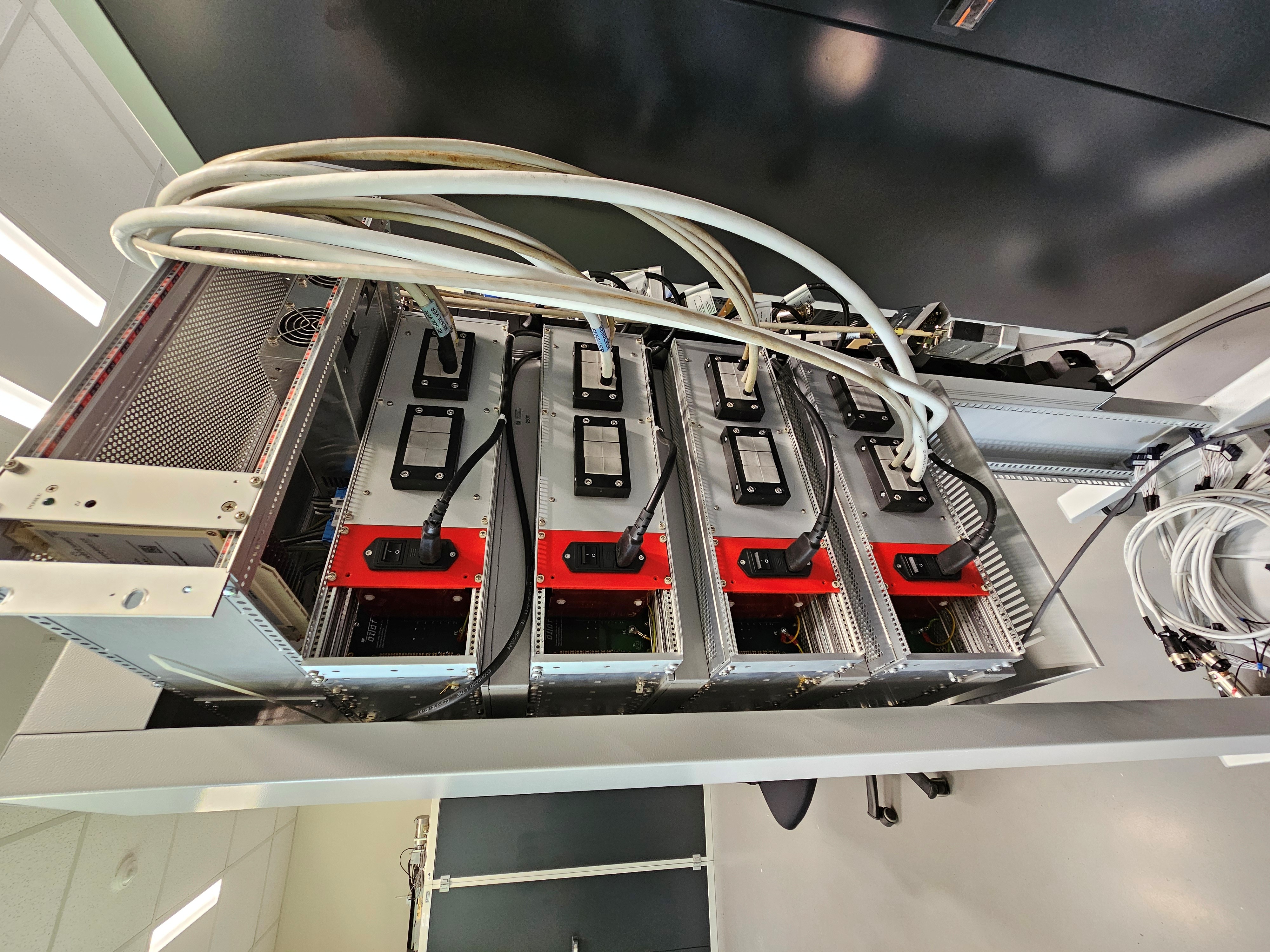
The new DI/OT-based design provides an elegant solution where a single DI/OT crate is capable of controlling up to 8 (possibly 10 in the near future) motor axes, read out position sensors (resolvers, LVDTs, etc.), interface with limit switches and other similar digital input devices (32 industrial input channels available) and drive 32 isolated digital outputs for controlling external motor drivers or any other device. The SAMbuCa system also provides 6 relay outputs (mostly aimed at interlocks).
The system uses a specially designed Rear Transition Module (RTM) which allows us to shorten the depth of the DI/OT crate while having all the cabling for the analogue and digital I/O coming off the back of the crate. Thanks to the shortened crate, the SAMbuCa system occupies half the depth of a standard rack, allowing deployments in shallow racks (or racks where equipment is mounted on both sides).
All the control is performed by the Xilinx Ultrascale+ FPGA on the DI/OT system board, using a combination of Linux (CERN FECOS for arm64, including FESA support), bare-metal software and programmable logic. The FPGA provides four ARM CPUs, two dedicated to Linux and two to bare-metal software, enabling hard real-time control alongside the Linux environment.
To be able to achieve this partitioning of processing and memory resources, the SAMbuCa development team implemented a solution based on the Xen hypervisor. Following the successful validation of this approach, BE-CEM is now exploring the integration of Xen as an option in the upstream DI/OT build system, in order to make it available to other DI/OT-based systems.
The complete system has been successfully tested through cycling tests on a single collimator testbench in B927. Currently, we are validating the newly received “pre-series” versions of the hardware which will be used for reliability testing, while also finalising the Production Test Systems (PTS) to validate the series production of the hardware.
Other test setups for three collimators and FRAS SCT (Single Component Test bench) are also being prepared in B272 and flex building. Looking further ahead, we are aiming for test deployments in FRAS (RAC3 and IT String) in Q4 2026.