12 June, 2023
16 organisations representing 19 light sources facilities across Europe collaborate together under the League of European Accelerator-based Photon Sources (LEAPS) initiative and met at CERN for a workshop on remote robotic handling on 23-24 May 2023.
 Figure 1: Workshop participants from CERN and the LEAPS consortium
Figure 1: Workshop participants from CERN and the LEAPS consortium
Why LEAPS and CERN? During the early phase of the COVID19 pandemic, the LEAPS consortium decided to promote activities that make its laboratories more resilient. One of the first actions was to improve the procedures and the efficiency of mailing samples to laboratories, and provide remote access for users as well as for local beamline scientists, says Dr. Marco Calvi from PSI, who is part of the consortium coordination. On this wave, the project Digital-LEAPS was defined, and is today running the following three pillars:
- STARS: Enhanced remote access for users;
- HR4: Enhanced digital platforms for networking & training;
- LIP: More resilient green sources & beamlines;
Within LEAPS, DESY proposed to explore the potential of using automation to supervise their accelerator infrastructure, not accessible by humans during regular operational time. This would allow measurements and trigger actions that today are only possible during shutdown times. Quickly, LEAPS identified CERN as a potential partner, recognising several years of ongoing use of robots for remote inspection, maintenance and repair, triggered by the harsh environment of the CERN accelerator complex and needs for personnel and machine protection.
This two-day workshop allowed many of the LEAPS consortia to present their needs and use cases of remote handling, solutions, and challenges they have faced and also to hear about the work being done at CERN in this area. On the first morning we heard about remote handling of radioactive targets at the Selective Production of Exotic Species (SPES) facility in Italy by Dr Giordano Lilli from INFN. Once operational, it will be able to generate high-intensity RIB (Radioactive Ion Beams) for research in the field of nuclear physics and investigate medical applications. During the operation, a periodic replacement of the Target Ion Source unit is required to maintain process efficiency, and for this reason, a remote handling framework is currently being developed to meet the functional and safety requirements of the project. In particular, they are researching procedures for recovery scenarios in the case of a problem.
Dr Andrey Vukolov, supported by Dr Francesco Guzzi, introduced robotics and imaging used in their multidisciplinary research center Elettra near Trieste, Italy, focused on autonomously navigating mobile robots with advanced AI-based obstacle detection. Their focus is to have high telepresence: for instance beamline scientists (as well as external users) can ask for tools which can be delivered to them in a fully automated way. From the consortium, they are interested in having point clouds/digital reconstruction of other labs accelerator/tunnel to test their own navigation algorithms. Following this talk, Dr André Dehne from ASPERON introduced MARWIN: the status quo on the semi-autonomous maintenance robot in the European XFEL. MARWIN is a research project between DESY and the Hochschule 21 in Buxtehude, a local university of applied sciences in Germany. It is a concept of a semi-autonomous driverless transport vehicle that is used for measurement and inspection work in the European XFEL, and the current challenge they are facing is how to improve the positioning accuracy.
Later, Dr Alina Andersoon from the MAXVI Laboratory reviewed their automated and self-operating processes. They are using manipulators and robotic solutions daily for tasks such as sample delivery, detector positioning, blue lining, and working on automated measurement methods. Their solutions are both customer-made and inhouse built applications, and particularly for survey blue lining, they find that a robotic system could have higher precision (~1mm) compared to doing the lining by hand (2-5mm). One challenge they find is that there are many robotic developments not always converging on common approach on hardware and software, and that a vision for the support of robotics activities needs to come from the top of the organization to help align these efforts.
The morning’s session was closed by CERN’s Dr Salvatore Danzeca, who provided an overview on developing electronics for radiation environments, explaining the process, and phasing at CERN, where electronics are used in the accelerator complex, the sources that we have and hence the type of radiation environments. RadMon, an R2E instrument that is installed in over 500 places at CERN was presented as well as IoTRadMon for low power use cases relying on LoRaWan. CERN has a large COTS components database of radiation tested devices which might be shared with LEAPS laboratories (highlighting the importance of a MoU). Additionally, the radiation facilities like CHARM and Cobalt60 could be opened to LEAPS to test novel COTS components (as well as full systems) under radiation.
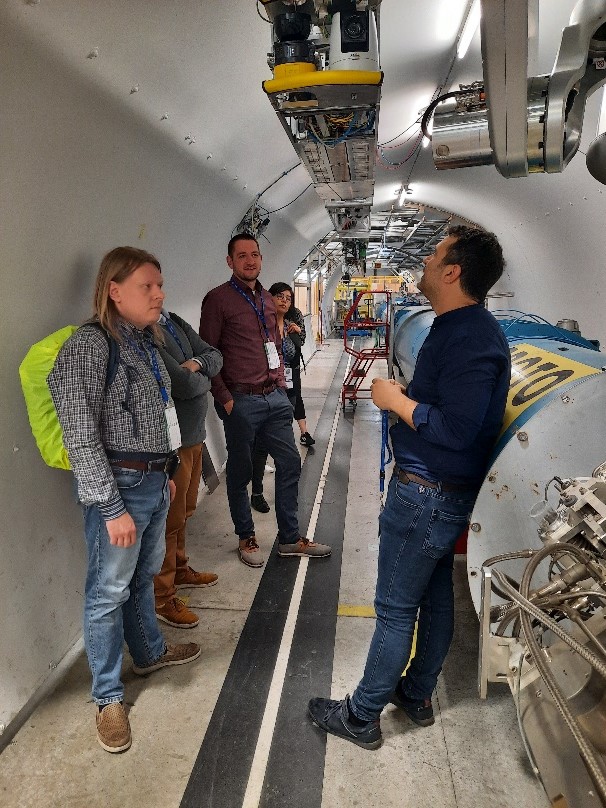
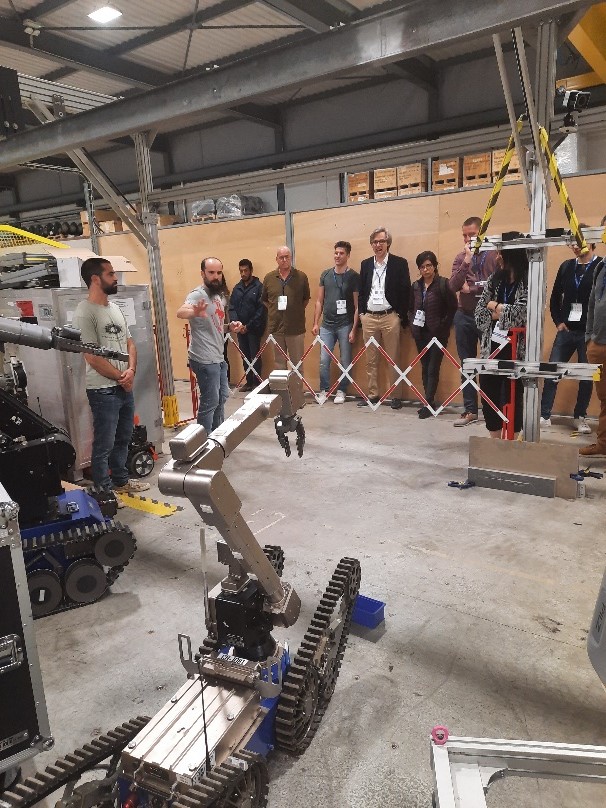
Figure 2: Seeing CERN commercial robots (left) and the TIM robot in the LHC mock-up (right)
Following a quick lunch at the sunny R2, the workshop continued in the afternoon. Dr Rainer Wanzernberg from DESY spoke about androids for remote access that are being considered for their ion accelerator tunnels. DESY operates three major accelerator facilities, PETRA III – the high brilliance 3rd Generation Synchrotron Radiation Source, FLASH – a free-electron laser for VUV and soft X-ray radiation and the European XFEL – a free-electron laser for ultrashort X-ray flashes. In addition to the MARWIN robot in the XFEL tunnel, there is also a strong interest to have androids for remote access at PETRA III, and the testing of external existing systems at PETRA could be an useful method of collaboration within LEAPS.
From SOLEIL in Paris, Dr Laura Muñoz introduced the status and challenges on automation and robotics. SOLEIL is a storage ring with 29 beamlines using 9 orders of magnitude in energy from far IR to hard X-rays. SOLEIL II represents a major upgrade of the accelerators and beamlines to address new scientific and societal challenges that will allow them to reach unprecedented spatial and temporal resolutions. They want to use automated and autonomous systems to simple the experimental procedures and corresponding workload of the operators, accurately gather experimental data and improve sample throughput and reduce the user burden and error. As part of this they are using the TANGO framework to connect their hardware and software platforms, in use in multiple wars with 6DOF arms and other motion stages. They have strong experience using robotic arms, and their framework and experience could be shared with other facilities.
Dr Marc Brügger from PSI introduced their two light sources, the Free Electron Laser SwissFEL and the Swiss Light Source (SLS). They have undulator control systems installed inside the accelerator tunnel, using Beckhoff PLC, EtherCat fieldbus and Heidenhain absolute encoders, and have overcome initial problems of early failed components, thermal issues but now see some issues around potential electromagnetic interference. They have built a customized robot to shim each magnets using a screw and wedge system, that can autonomously manage magnet corrections, and interesting solution that relies on smart mechanical solutions, as well as software sensing and autonomy.
 Figure 3: The wrap up of a very fruitful workshop
Figure 3: The wrap up of a very fruitful workshop
Finally, Dr. Luca Rosario Buonocore provided an overview on the use of robotics at CERN. Robotic systems are largely used to decrease human exposure to hazards in hostile environments and perform remote handling tasks as and when is needed across the complex. To achieve this, a fleet of robots has been custom-built at CERN, and combined with commercial platforms, with a modular software and interface framework that is constantly being optimized for the operator’s experience. Based on the feedback retrieved by the many remote robotic interventions done on the field during the last years, a code of practice framework for remote maintenance has been created to assist design engineers with guidelines to be followed for machine components design to ensure compatibility with remote interventions. Such best practices can be applied also outside CERN, indeed to any environment where robots must dynamically interact with a designable environment.
After the talks had finished, the group moved to the robotics labs and workshops in Prevessin, to see demos of the systems that the BE-CEM group had prepared. It was an interesting couple of hours with many questions thrown about and a lot of interest in future projects developed. The talk continued over a social dinner.


Figure 4: Demos of the FCC Prototype robot (left) and the 3D Operator GUI (right)
The second day of the workshop allowed the participants to talk together about the commonalities of all the information presented and see what steps could be taken in the future. The main message from the workshop is that there is strong interest from all parties to share expertise and continue and form new collaborations, particularly for mobile robot testing on underground and uneven terrain, coupling tools and tool exchangers, sharing of algorithms, frameworks and test datasets, awareness of regulations and certifications needed for operators and a general interest in radhard electronics and remote inspection, RP measurements and performance benchmarking. Deep expertise in a multitude of areas is needed to make robotic systems perform well in many different environments, and collaborations are critical to achieve this.
A message from Dr Marco Calvi: “This workshop has been extremely useful to know each other. A first step to get an overview of the robotic activities ongoing at the LEAPS light sources…the input from CERN is very precious, they have a large experience in highly activated environments which could be transferred to our facilities to run robots in accelerators during their operation. Moreover, CERN is a strategic partner also considering the new eligibility criteria of some EU calls.”
LEAPS is transforming into a legal entity (Belgian AISBL); the decision was taken and will be completed by the latest early 2024. An addendum to an existing MoU between DESY and CERN is under consideration to simplify the future actions of this strategic collaboration, and for the time being, DESY will act as a gateway for LEAPS at CERN to continue discussions and follow up activities.