When operators detected an anomaly on the functionality of an XTAX in the North Area, a robotic visual inspection was requested, however, currently access is impossible with wheeled robots in this area, so CRANEBot and a quadruped robot teamed up to help each other inspect the area.
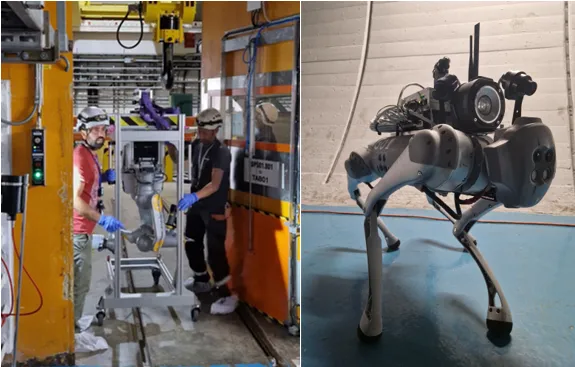
CRANEBot (left) being attached to the North Area crane
and quadruped robot (right) with intervention loadout
North Area’s experimental zone is a challenging environment for robotic systems. Obstacles, tight spaces, and uneven, difficult terrain make the approach impassable to wheeled platforms, so instead, CRANEBot was deployed to move into investigate from above, and CERN’s first legged robot was used to take a view from below. CEM robot named CRANEBot is a dual-arm robot which is attached to, and moved around by, an overhead crane, unimpeded by the challenging ground conditions. The CEM quadruped robot uses its four legs to tackle the tricky terrain on the ground and inspect from below. This was the first full intervention that used the quadruped combined with CRANEBot.
This mission was triggered by a loss of control to the XTAX, but the cause of the problem could not be identified remotely, and only a visual inspection could further investigate the issue.
The robots were moved into place and teleoperated from the tunnel adjoining the experimental area, where thanks to the cameras onboard both robots, the operator can perceive the robot and their surroundings. Both robots were equipped with onboard lights to see and navigate in the dark environment and sensors to track the dose rate in the area. The CRANEBot has an additional robot visualisation to represent the state of the robot in real time.
Once in the area, CRANEBot was moved into position using the overhead crane, piloted using the cameras onboard the robot, while the legged robot moved into position over the pipes, cables and obstacles on the ground. Both reached the inspection point without issue.

CRANEBot’s camera feed shows the area and gives an aerial view
of the quadruped, seen in the left and top panels
To help one another to navigate in the difficult area close to the target, the camera feeds of each robot was focused on the other to provide an additional external view of the environment, the CRANEBot giving an aerial view of the quadruped and the quadruped giving a ground-up view of the CRANEBot. Taking turns to move around and give a view to the other robot, both were able to move around the site more quickly and safely than they would have been able to in the dark environment.

Quadruped camera feeds give a ground-up view of CRANEBot and a view of the XTAX
After inspecting different parts of the structure, an issue was found with a mounting bolt in the upper part of one of the XTAX columns by the CRANEBot.
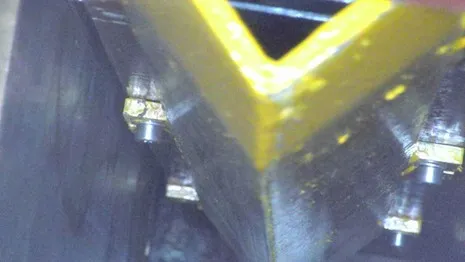
Missing mounting bolt located by CRANEBot
Remote robotic interventions are crucial for harsh environmental conditions, and each area at CERN poses new challenges for robotic systems, requiring the robotic systems and intervention approach to be adaptable enough to deal with any situation, which was on show here with the CRANEBot and quadruped working together to successfully complete the intervention and provide important data for diagnosis and future planning. Thanks to this robotic intervention, the BE-CEM Beam Intercepting Devices Controls piquet team had put the XTAX out of chain and shift its safety related operational tasks to another XTAX (Control hardware and software intervention). Deploying robotic systems removes the need for personnel to enter such harsh areas and CERN’s robotic fleet is ready to be adapted to the next new challenge.

Operation and control area in safe zone nearby intervention site
Recent content
-
Successful Robotic Beryllium Detection in North Area TCC2
-
A Record Year in Radiation Testing!
-
New soft robot prototypes for the CTAM project
-
White Rabbit Event Node Deployment
-
Robotic RP Surveys Successfully Completed in SPS and LHC for TS1 2025
-
PXI-Based SEL System Characterizes High-Q₀ Superconducting Swell Cavity
-
Distributed I/O Tier pilot deployment for Warm magnet Interlock Controller v2
-
Robotic Milling of the CMS Rotating Shielding
-
n_TOF SPALLATION TARGET AUTOPSY
-
White Rabbit Collaboration meeting held at CERN