October marked a major milestone for the CTAM project in BE-CEM-MRO: The first integration tests of a brand-new soft robot prototype.
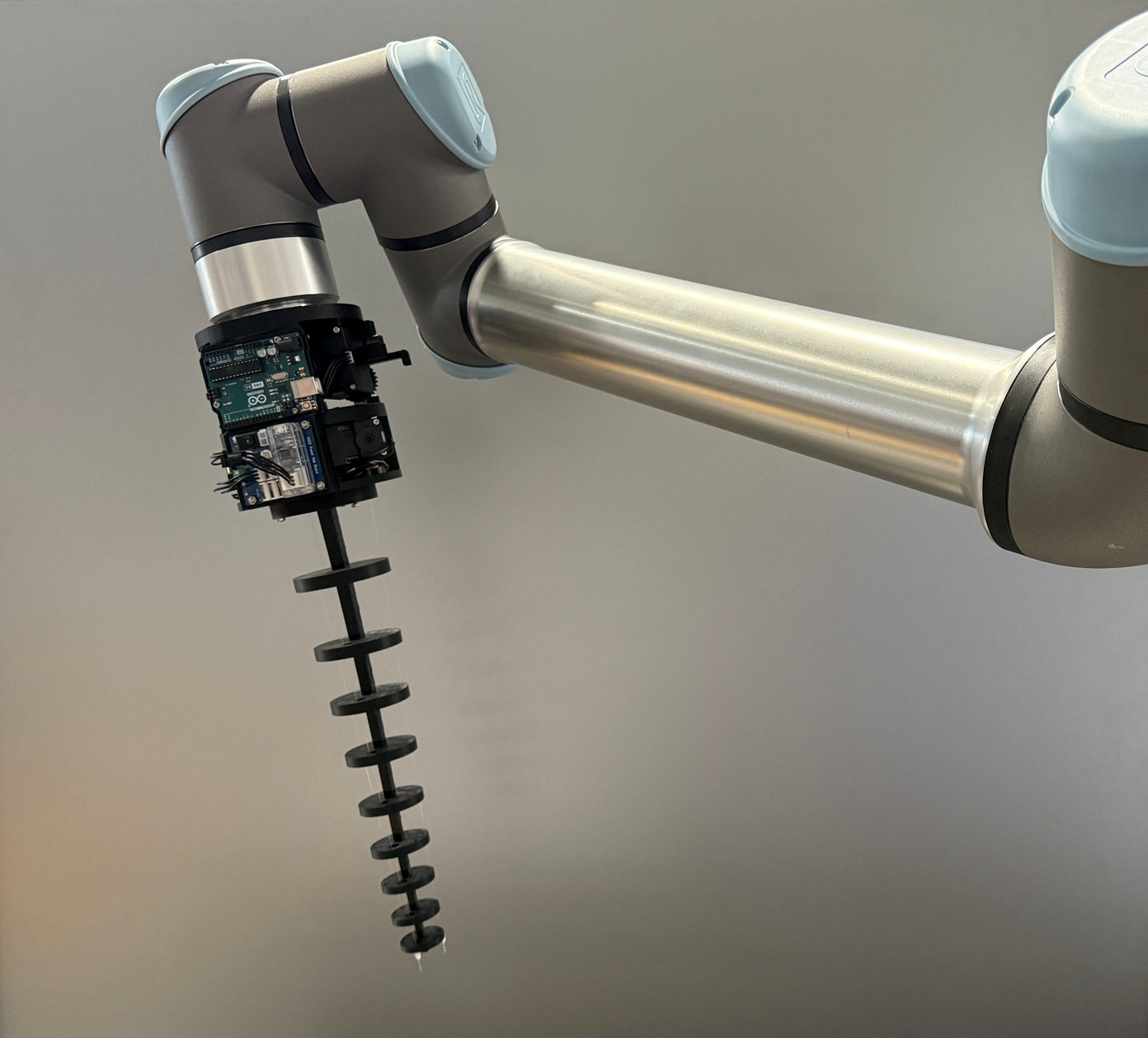
Mounted on the FCC robot, this innovative design showcases impressive flexibility, compliance, and modularity, proving the potential of next-generation continuous tendon-actuated manipulators (CTAM).
The robot consists of a tapered, flexible TPU 95A backbone with friction-fitted rigid PLA disks, designed such that the robot constitutes the logarithmic spiral in its curled state, as shown in Figure 2.

An alternative design is printed in all TPU 95A with thicker segments for the tendon routing holes, preventing the backbone from buckling. Also here, the robot curls like the logarithmic spiral. This design is inspired by the SpiRobs project by Zhanchi Wang, Nikolaos Ferris and Xi Wei and is shown in Figure 3.

The curling and uncurling motions of both designs are shown below. Thanks to our automated CAD generation, design parameters such as robot length, thickness and segment spacing can easily be modified, allowing for fast prototyping. Hence, the robots can be fabricated rapidly with various flexibilities, payload tolerances and workspaces.
Following video shows how the robot grasps a roll of tape and places it around a cylinder.
The robot has an integrated endoscopic camera and a motorized endoscopic tool routed along its backbone, allowing for teleoperated small-scale manipulation with tools such as grippers and scissors, both with an outer diameter of 2.8 mm. The next video shows the robot stacking breadboard jumpers in a pile using the endoscopic gripper. The upper right of the video is the operator’s view from the endoscopic camera.
The robot was also tested for inspection tasks, enhancing the workspace of the FCC robot. The following video shows how CTAM manages to read the QR code for a Beam Loss Monitoring (BLM) device on the LHC mock-up in the presence of obstacles.