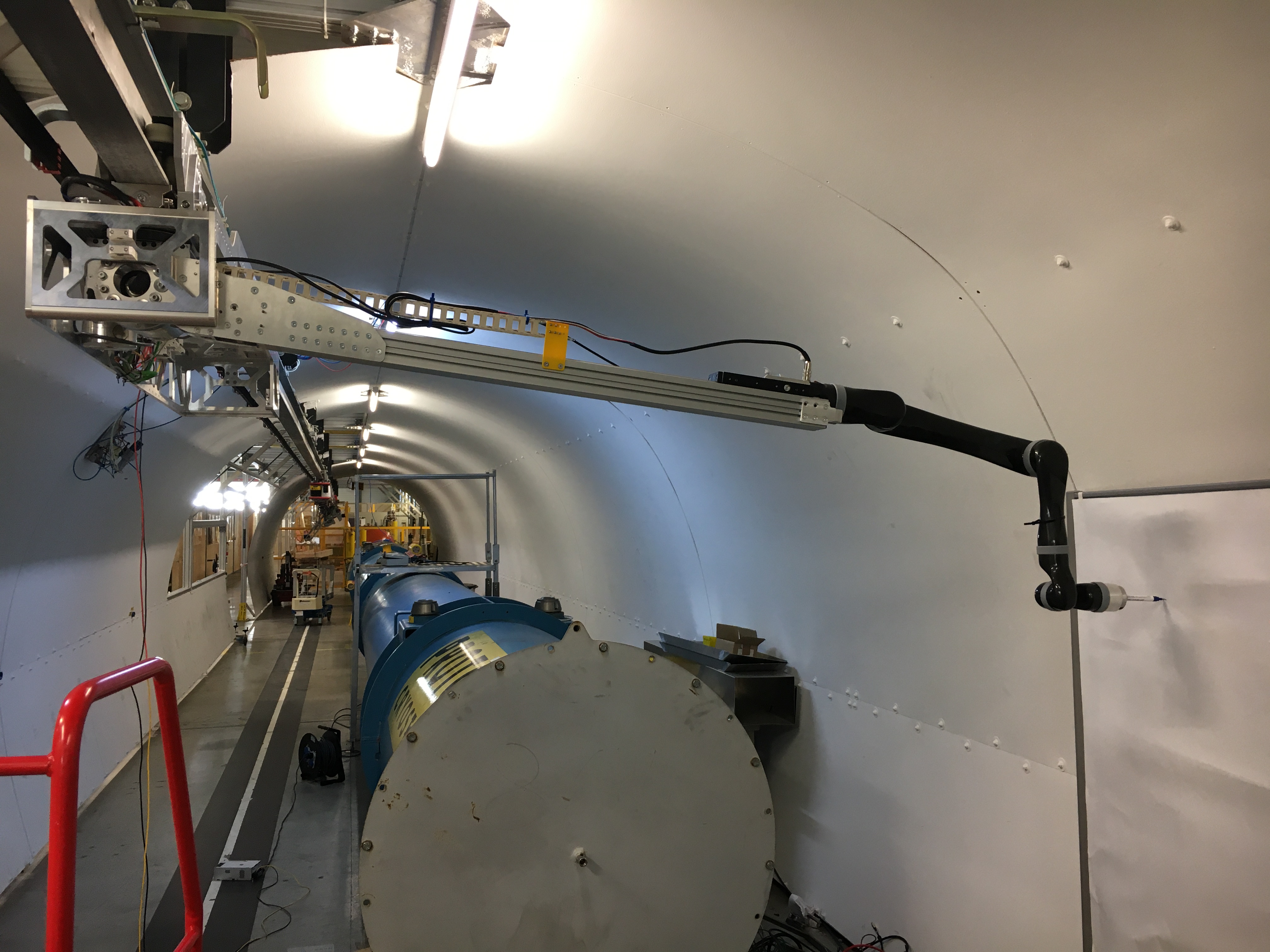
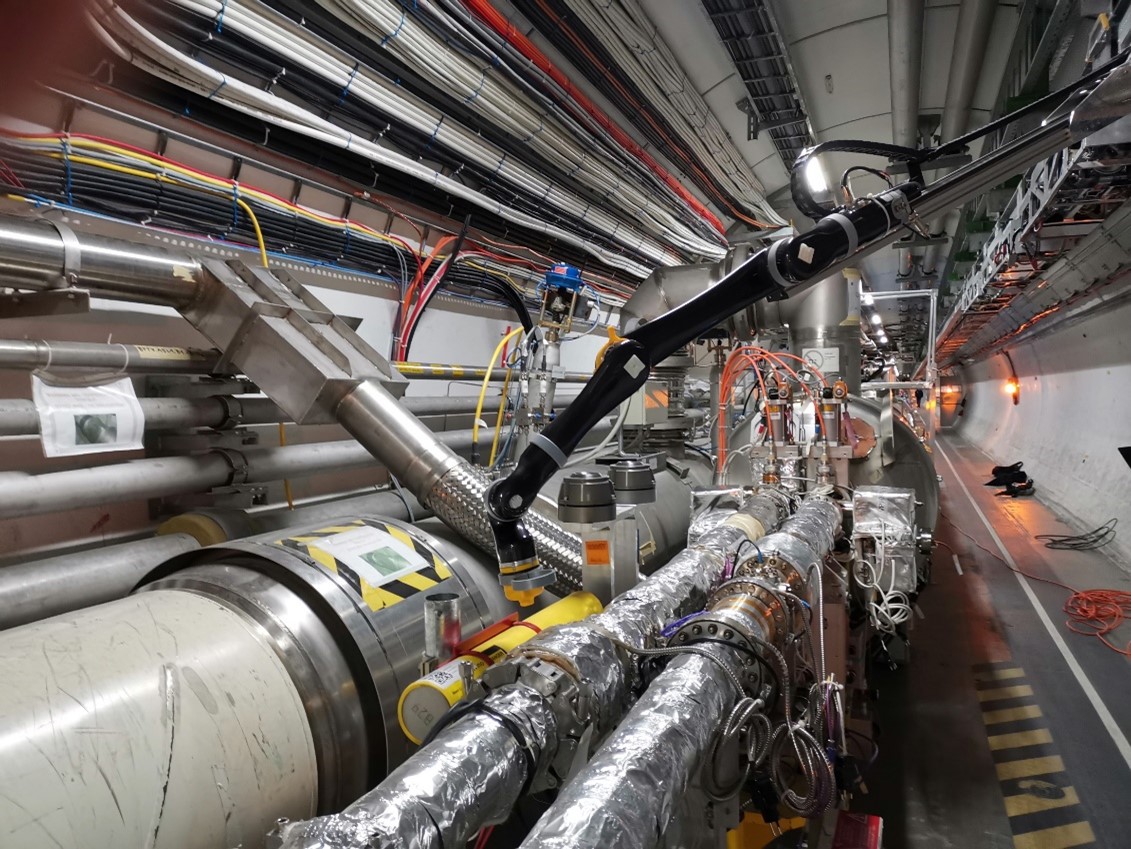
This new wagon has been developed ad hoc to perform, autonomously, the validation of most of the 4000 BLM in the LHC tunnel, saving time and dose to the personnel with respect to the manually procedure performed previously using a “trolley-based” irradiator.
BLM devices are part of the LHC Machine Protection System. Mainly consisting of ionization chambers, the sensors are yellow cylindrical objects placed either horizontally or vertically on both sides and the top of the accelerator and scattered around the 27 Km ring every few meters.
It is critical that each one is tested and validated before each Run.
The validation procedure consists in the excitation of the BLM with a radioactive source placed in proximity and the related verification of the reading signal.
Once TIM has reached the estimated position of the BLM sensor, the robotic arm leaves the rest position, grasps the radioactive source from the shielding, and moves close to the surface of the ionization chamber. Here the system reads the QR code of the sensor via onboard cameras to check in the database that the correct BLM is being triggered above the desired threshold and the measurement signal read. The system can also be used to take photos of each sensor for later characterisation and further checks.
The BLM validation campaign is foreseen to take place for the entire summer and conclude by the beginning of Run 3. Currently, the measurements are carried out remotely by an expert operator but, in the future, the system will move towards complete autonomous operations. The system can also be used for the validation of PMIL sensors. The current mechatronics design of the robotic arm allows to reach and test 95% of the LHC BLM sensors. In areas that the TIM cannot reach, a complementary system using the CERNbot robot will be used where possible.
In the following sections some robotic and mechatronic design challenges are detailed.
Low profile, foldable robotic arm
The arm must be able to reach the BLM sensor that could be positioned on the internal, top or external sides of the accelerator. For this purpose, a 6 Degrees Of Freedom (DOF) commercial robotic arm has been mounted on a fully custom CERN-designed harmonic drive 3 DOF robotic arm. In this way the wagon arm has high and accurate manipulability combined with a long reach. It can fold and pack in on itself to fit within the TIM wagon, that has a cross section of 30 x 30 cm to ensure the TIM can safely pass through the special cut-outs in the sector doors of the LHC.
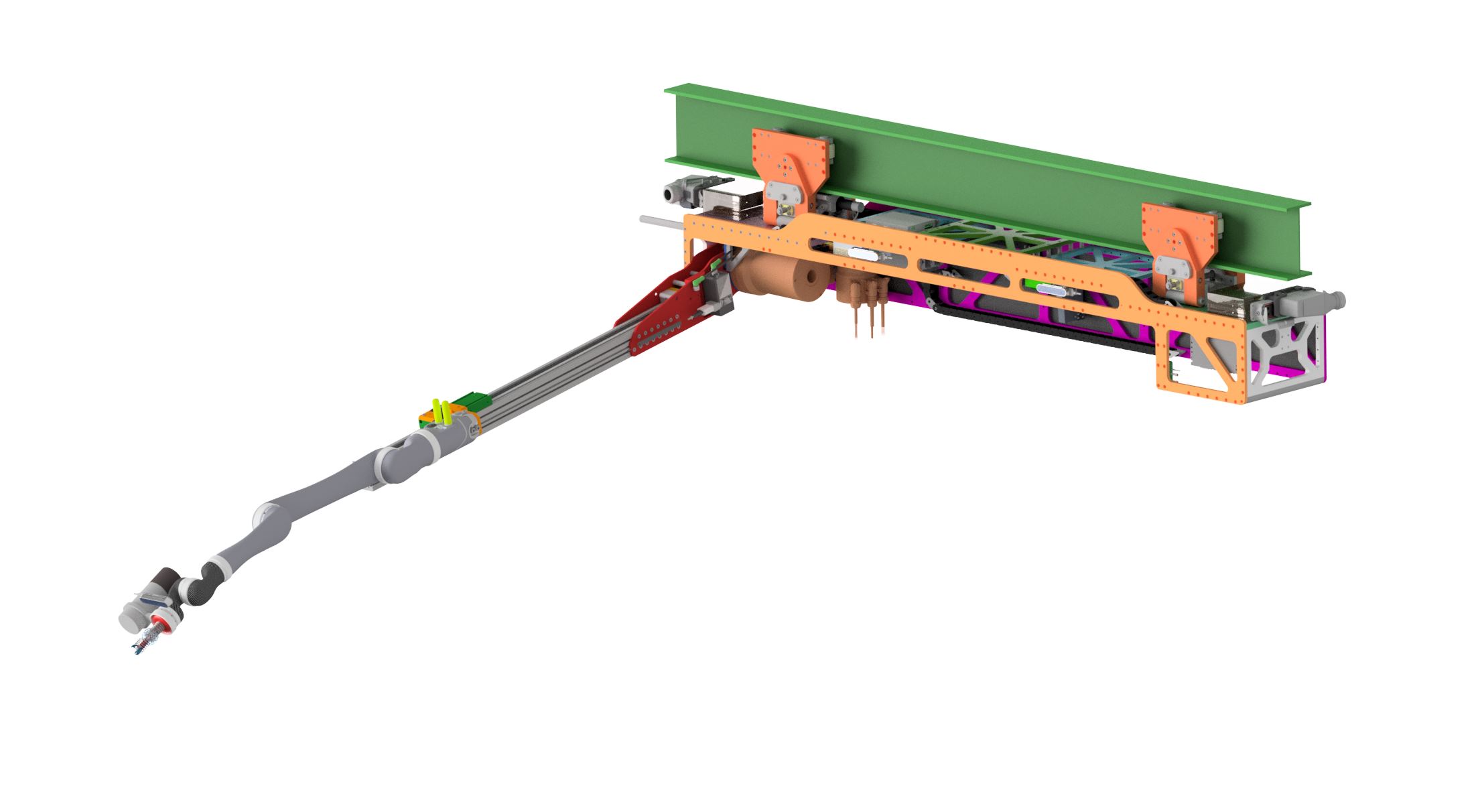
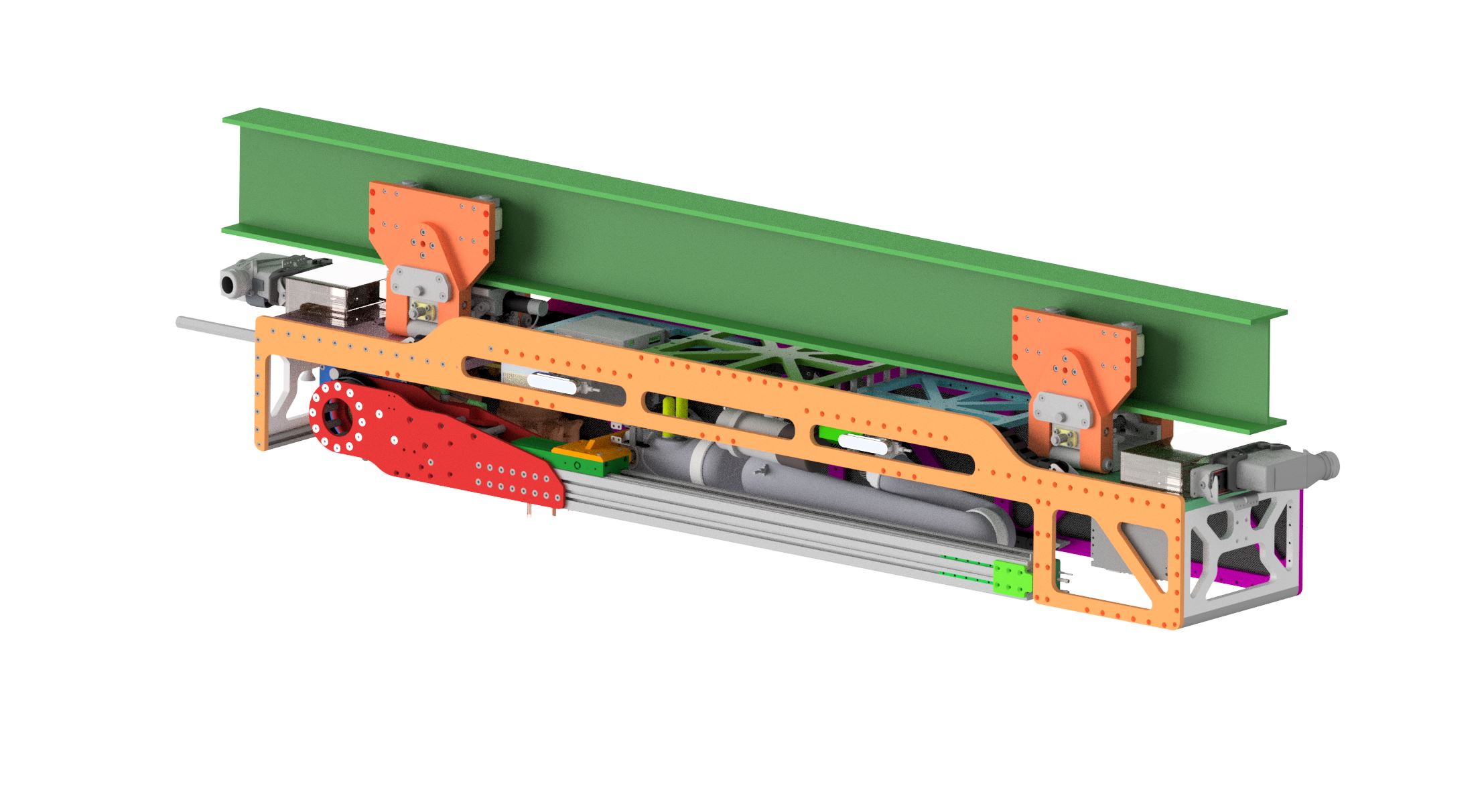
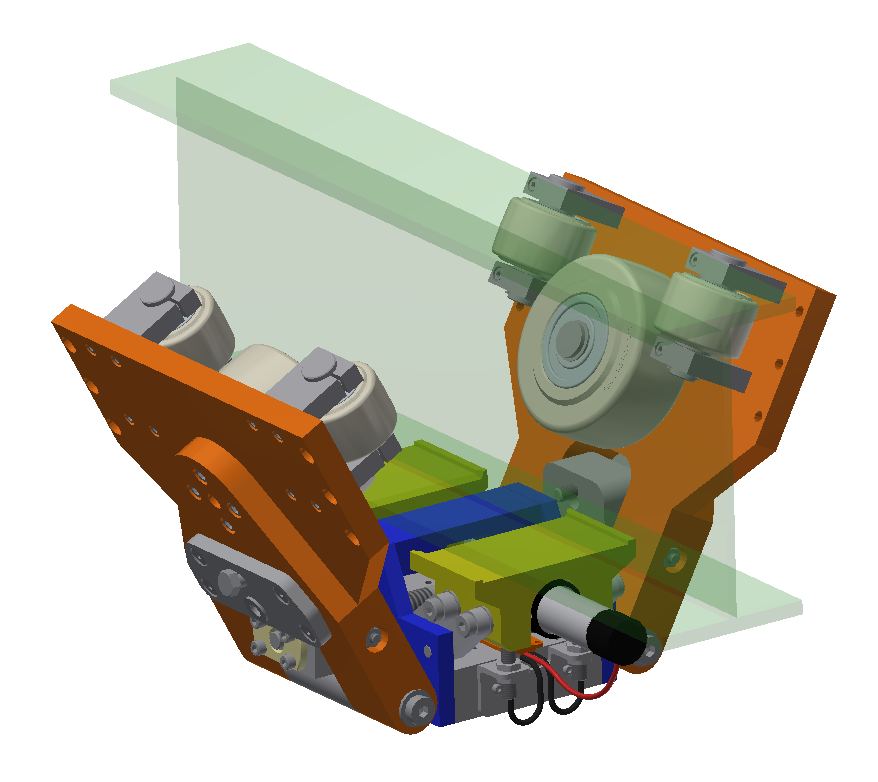
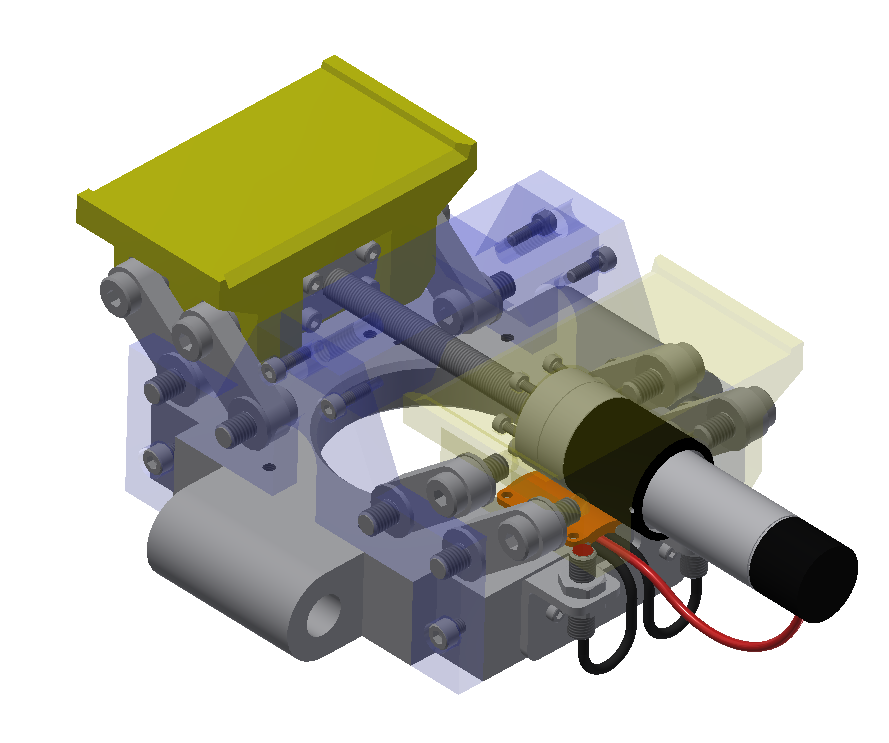
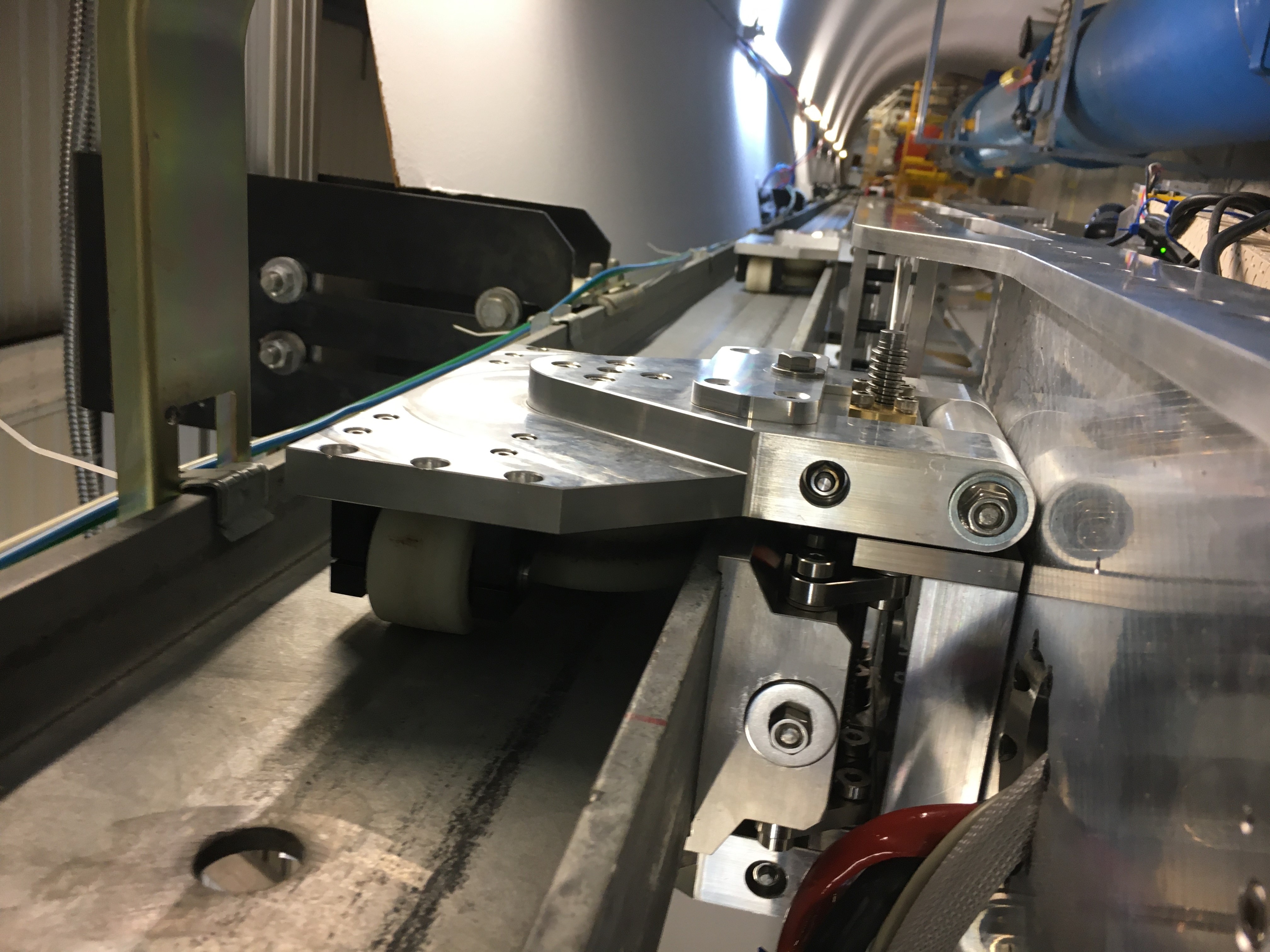
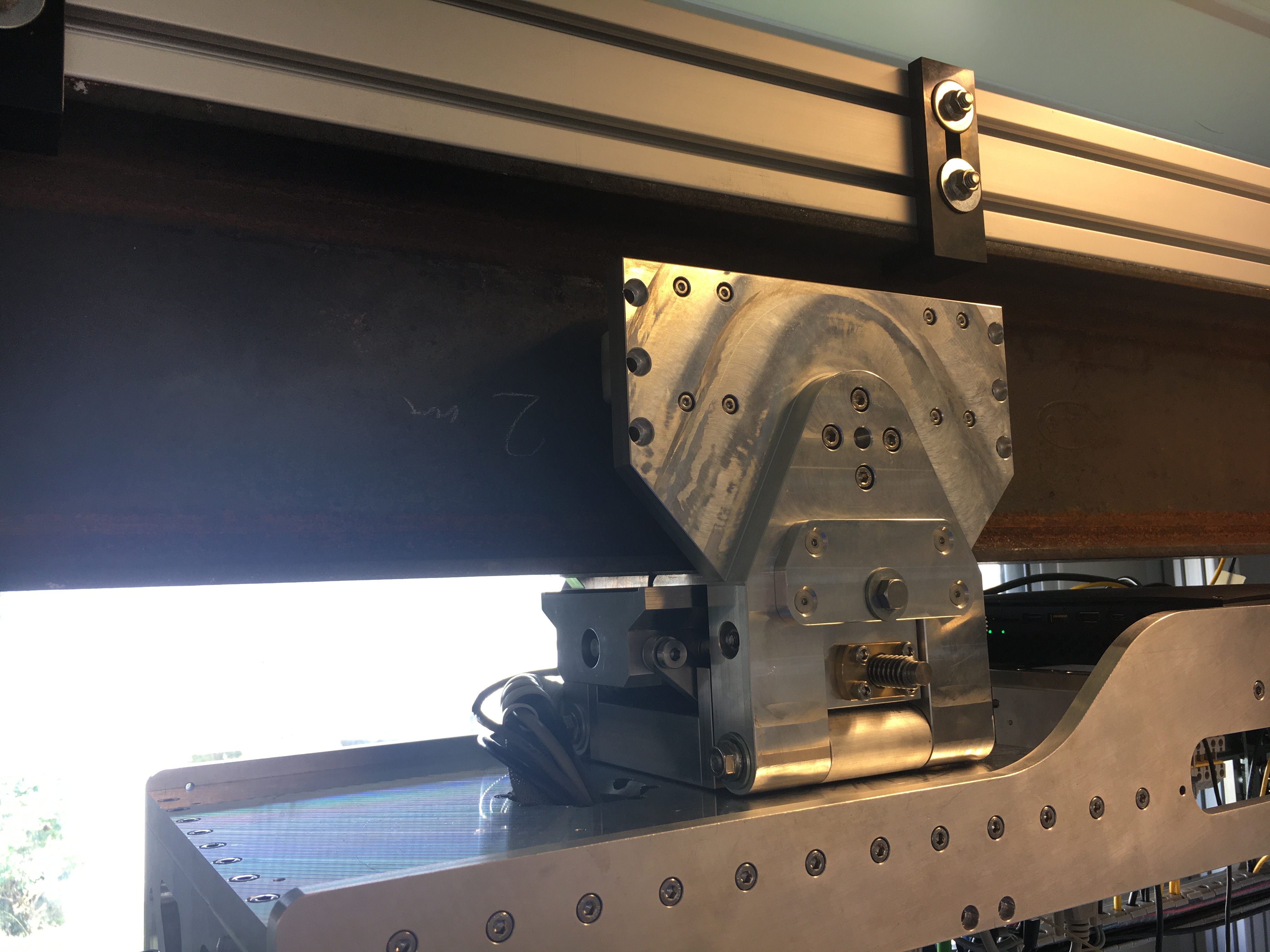
New bogie system with robotic stabilizer
This application implies high load and torsional stresses on the TIM robotic wagon, that contributes to errors when positioning the robot arm. The standard TIM wagon is not conceived to sustain transversal forces with respect to the monorail direction. Because of that, n new bogie system has been designed and integrated, which uses a robotic stabilization system to securely fix the wagon on the rail during manipulations.
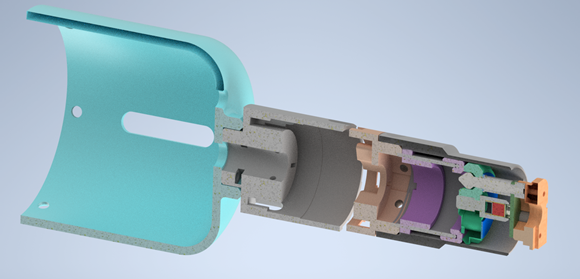
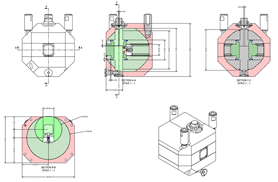
Compact transportable storage shielding for 1.8GBq source
To safely shield and transport the radioactive source around the LHC, a novel, tungsten, motorized and sensorised shielding has been developed. It is operated via a motor, has passive internal and active external sensors to understand the status of the source, and various design features to aid emergency recovery scenarios.
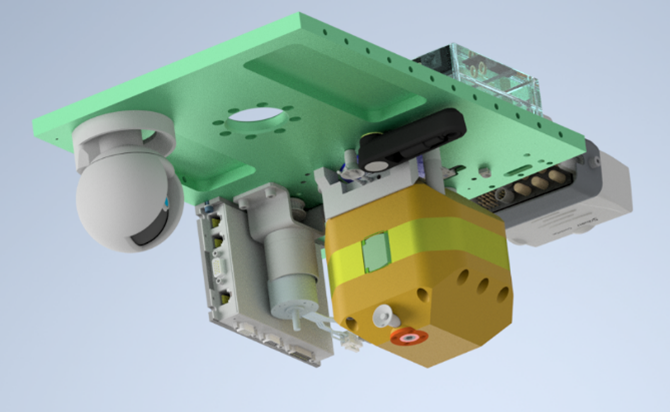

Fully custom end-effector
The end-effector of the robotic arm consists of a sensorized gripper that securely holds the source without direct contact of the source with the robotic hardware. This is achieved via a keyed holder mechanism that couples the source either with the shielding or with the gripper. The end-effector consists of a camera to see the environment, an RP sensor to measure the presence of the source and an internal endoscopic camera to help the operator to remove and replace the source in the shielding. It also has mechanical compliance via the presence of a spring, and torque sensors as further safety features.